10. Brick-Buttons und Tastaturtasten
Mit den Methoden isUpHit(), isDownHit() usw. kann man abfragen, ob einer der Brick-Buttons UP, DOWN, LEFT, RIGHT, ENTER und ESCAPE.PUNKT WEG gedrückt wurde.. Im direkten und Simulationsmodus entsprechen der EV3-Buttons die Tastaturtasten UP, DOWN, LEFT, RIGHT, ENTER und ESCAPE.
Beispiel 1: Roboter mit Tastaturtasten steuern
- UP: vorwärts fahren
- DOWN: rückwärts fahren
- LEFT: links drehen (auf Kreisbogen)
- RIGHT: rechts drehen (auf Kreisbogen)
- ENTER: anhalten
- ESCAPE: Programmausführung beenden
|
|
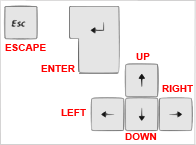
Tastaturtasten
|

Brick-Buttons |
# Ro10a.py
from simrobot import *
#from ev3robot import *
robot = LegoRobot()
gear = Gear()
robot.addPart(gear)
while not robot.isEscapeHit():
if robot.isDownHit():
gear.backward()
elif robot.isUpHit():
gear.forward()
elif robot.isLeftHit():
gear.leftArc(0.2)
elif robot.isRightHit():
gear.rightArc(0.2)
elif robot.isEnterHit():
gear.stop()
robot.exit()
|
Programmcode markieren
(Ctrl+C kopieren, Ctrl+V einfügen) |
Erklärungen zum Programmcode:
 |
if isDownHit(): gibt True zurück, wenn die Taste Down (Remote- und Simulationsmodus) oder der Button Down im autonomen Modus gedrückt wurde. |
Beispiel 2: Roboter wird durch eine Hindernisbahn gesteuert.
Die erste Hindernisbahn besteht aus gleich langen Wegstücken. Mit den Cursortasten LEFT / RIGHT (direkter- und Simulationsmodus) oder Buttons LEFT/RIGHT (autonomer Modus) dreht der Roboter jeweils rechtwinklig in die entsprechende Richtung und kann die Hindernisbahn durchfahren.
# Ro10b.py
from simrobot import *
#from ev3robot import *
RobotContext.useBackground("sprites/bg.gif")
RobotContext.setStartPosition(310, 470)
robot = LegoRobot()
gear = Gear()
robot.addPart(gear)
gear.forward(3200)
while not robot.isEscapeHit():
if robot.isLeftHit():
gear.left(550)
gear.forward(3200)
elif robot.isRightHit():
gear.right(550)
gear.forward(3200)
robot.exit()
|
Programmcode markieren
(Ctrl+C kopieren, Ctrl+V einfügen) |
|
|
 |
Erklärungen zum Programmcode:
|
forward(3200)
: im Simulationsmodus besteht die Bahn aus gleich langen Wegstücken |
Beispiel 3: Um eine komplexere Bahn zu durchfahren, werden zusätzlich die Tasten UP und DOWN verwendet.
- UP: vorwärts fahren
- DOWN: stoppen
- LEFT: rechtwinklig links abbiegen
- RIGHT: rechtwinklig rechts abbiegen
Für den realen Roboter kann eine beliebige Hindernisbahn gebaut werden, wobei das Programm nur im direkten Modus sinnvoll ist, da man die Brick-Buttons während des Fahrens schlecht bedienen kann.
|
|
 |
# Ro10c.py
from simrobot import *
#from ev3robot import *
RobotContext.useBackground("sprites/bg2.gif")
RobotContext.setStartPosition(410, 470)
robot = LegoRobot()
gear = Gear()
robot.addPart(gear)
while not robot.isEscapeHit():
if robot.isUpHit():
gear.forward()
elif robot.isDownHit():
gear.stop()
elif robot.isLeftHit():
gear.left(550)
elif robot.isRightHit():
gear.right(550)
robot.exit()
|
Programmcode markieren
(Ctrl+C kopieren, Ctrl+V einfügen) |
 |
Aufgaben: Serie 10 |
1) |
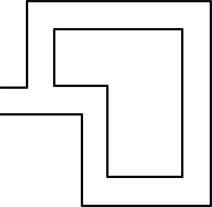
Der Roboter soll mit den Tastatur-Tasten durch den nebenstehenden Parcours gesteuert werden.
Für die Simulation kannst du das Hintergrundbild bg3.gif verwenden:
RobotContext.useBackground("sprites/bg3.gif")
RobotContext.setStartPosition(410, 475)
|
|

|
2) |
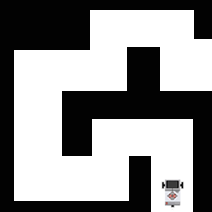
Mit der Hilfe der Tastatur-Tasten kannst du den Roboter durch den Kanal steuern.
Für die Simulation kannst du das Hintergrundbild channel.gif benutzen
RobotContext.useBackground("sprites/channel.gif")
RobotContext.setStartPosition(35, 245)
RobotContext.setStartDirection(0)
|
|
|
|
|
|
|